Vaska Robot Hand-Held Controller
August '18 - December '18
I was a Junior Product Designer in a team of four interdisciplinary designers at Volga Instruments Pvt. Ltd. Our problem was to solve the issue of warehousing and warehouse automation, so we built a prototype of a pick-and-place robotic arm. This was a three phase project where in the first phase, we worked as a team to find the product requirements, study the habitat and work with the company to make a business model. In second phase, we designed the product on CAD and did mechanical and electronic testing to build 2 iterative working mock-ups. In third phase, we built a working prototype for installing vison-based AI, we divided the project into three parts of the robotic arm as modular units of:
1. Pick-and-Place arm for installation of AI
2. Electronics Unit for mobility
3. Hand-held controller for manual maneuverability
I was involved in the style and Industrial design of the pick-and-place robotic arm and a hand-held-controller to maneuver the machine for teaching, diagnostics and manual-operations.
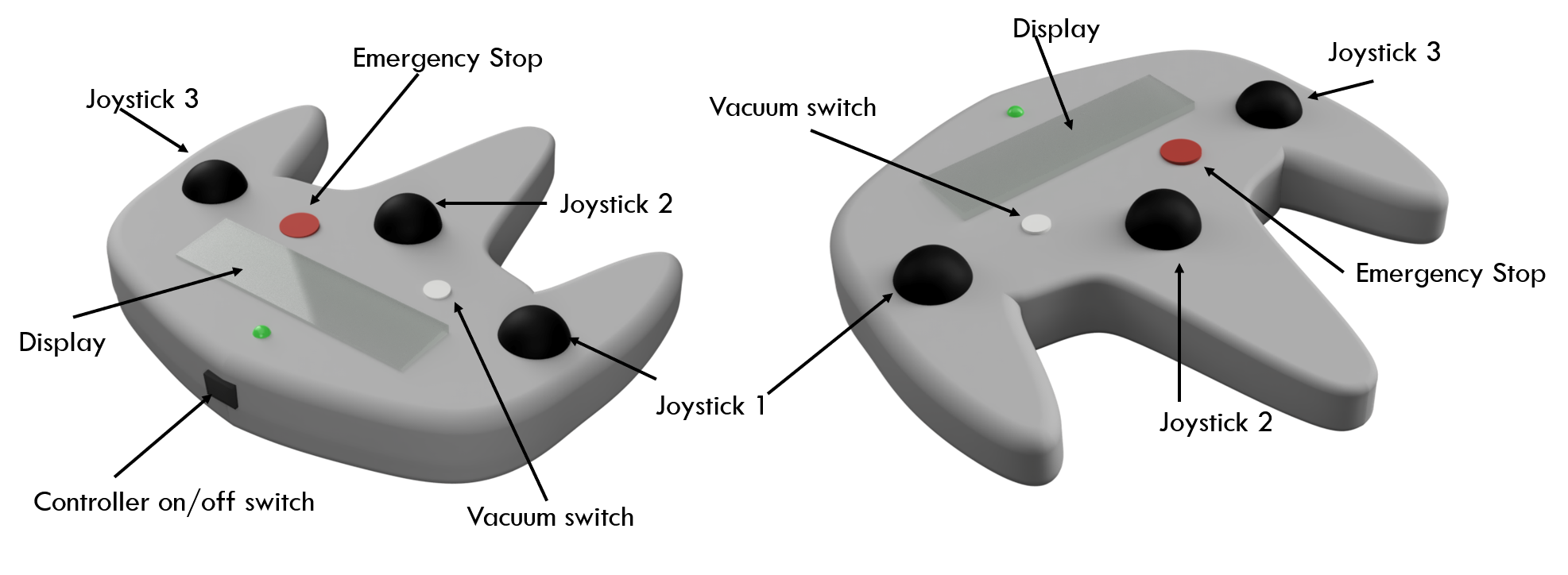
I built a Hand-Held Controller with guidance from my Hardware Designer team-mate for the circuit design, electronics and 3D printing. Arduino Nano, three joysticks, 4 buttons and an LED screen were used in the electronics. Some software I used were Fusion 360 to design the body of the controller, Arduino IDE to make the components work and Visual Studio to run tests on the set-up.
Process
01 Project brief
02 Guidelines
03 Concepts
04 Teardown Study
05 Mock-ups
06 Prototype
Project Brief
Requirements for this project were to move the Robotic arm with the help of a device which is portable and manually teach the arm to learn movements by repetition.
We envisioned the robot controller to be a universal plug and play system so a Selective Compliance Assembly Robot Arm could be maneuvered with the help of the controller.
I was involved in the design of the hand-held controller while my team mate built the electronics hardware for controlling the SCARA and providing a connection for the hand-held controller.
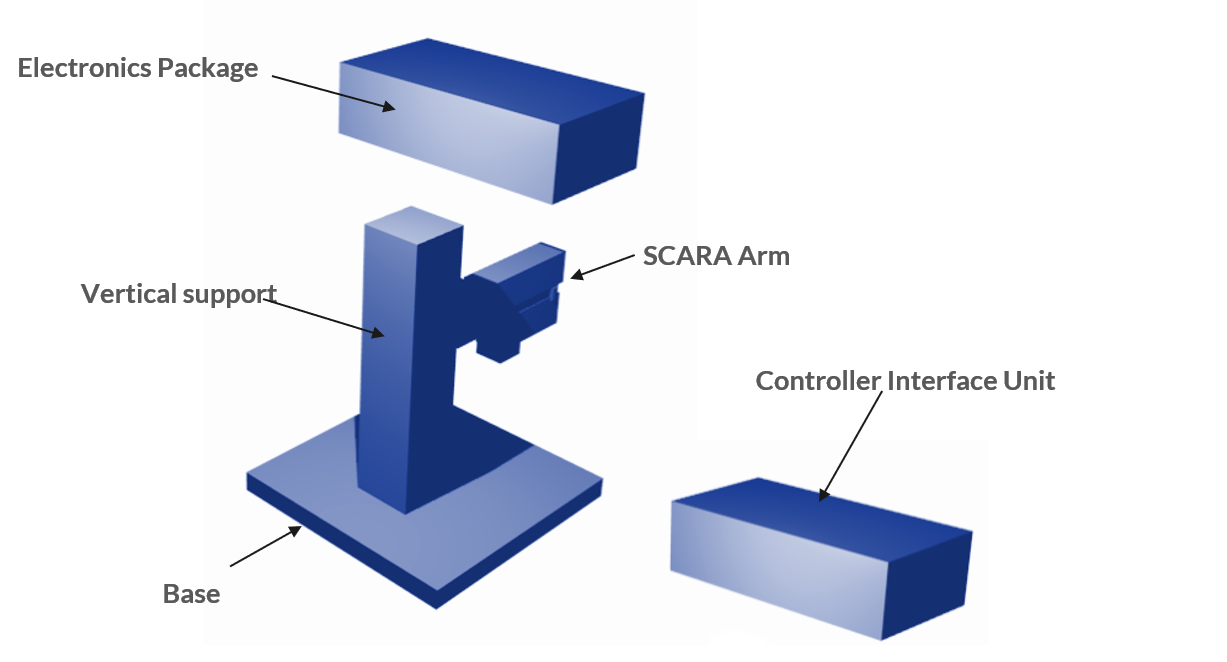
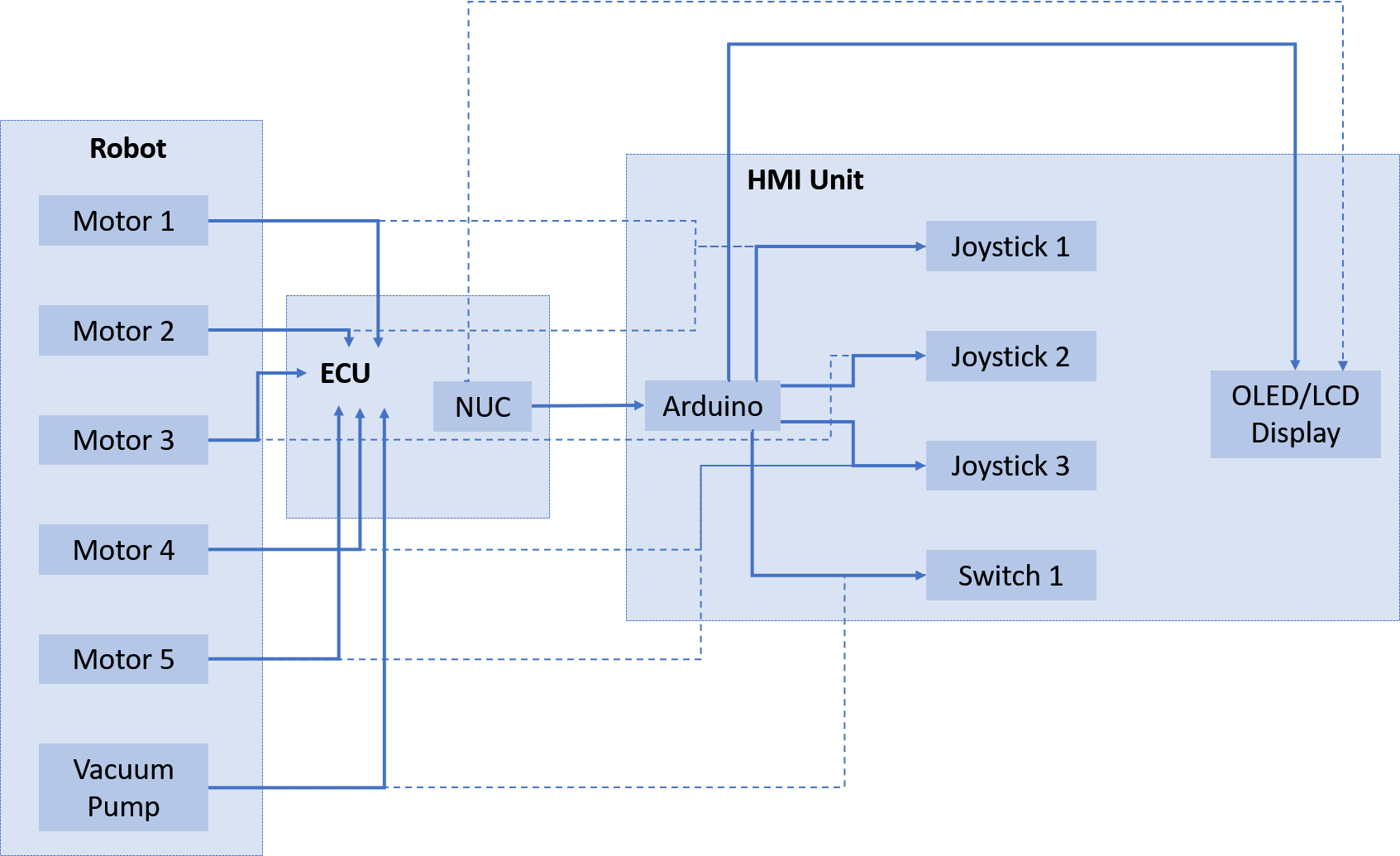
Below is the block-diagram of the Electronics architecture of the whole SCARA, the AI system and controller unit.
Guidelines
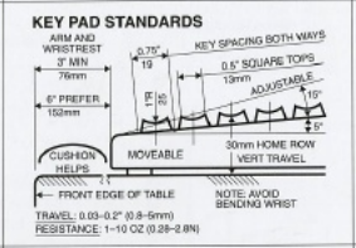
I referred to ISO 9241-400 which is the Ergonomics of Human-System Interaction for physical input devices and Standards on Human Factors for HMI.
Below is an image from some of the standards used as reference:
Concepts
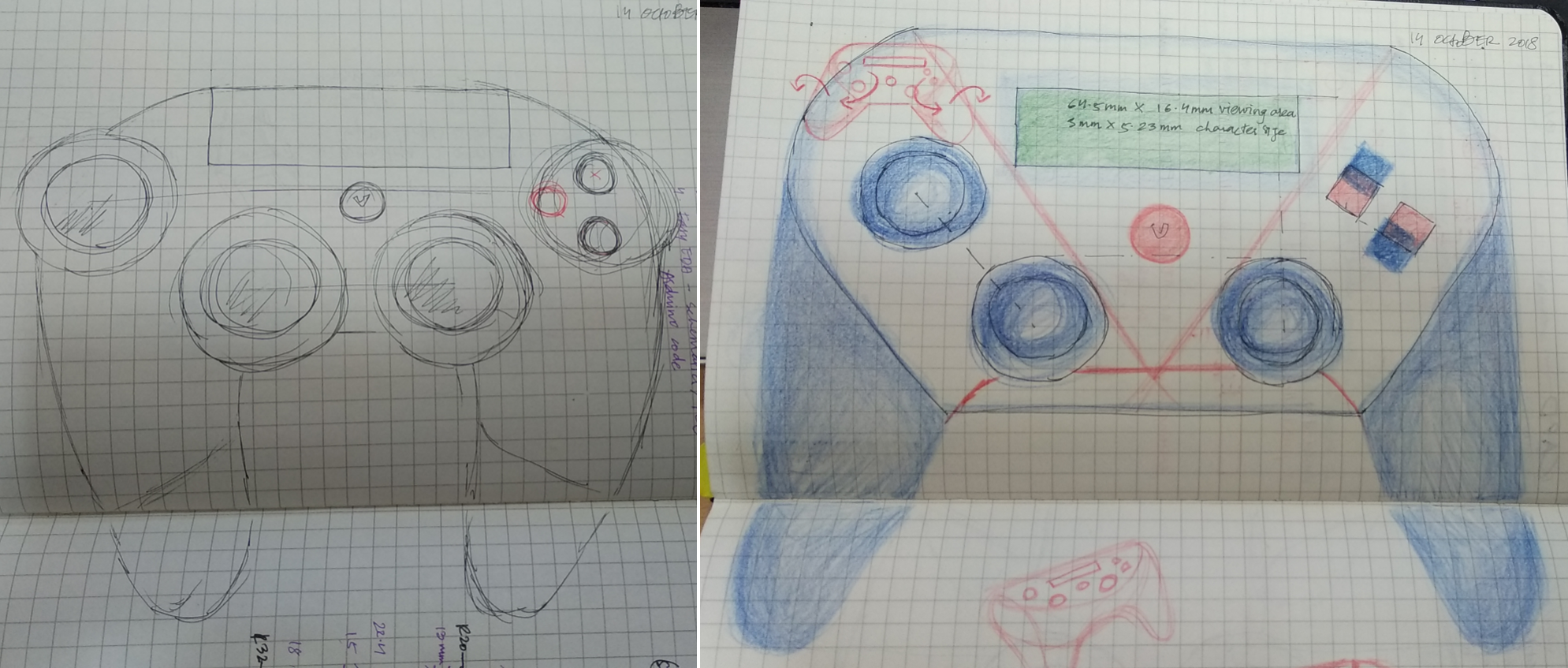
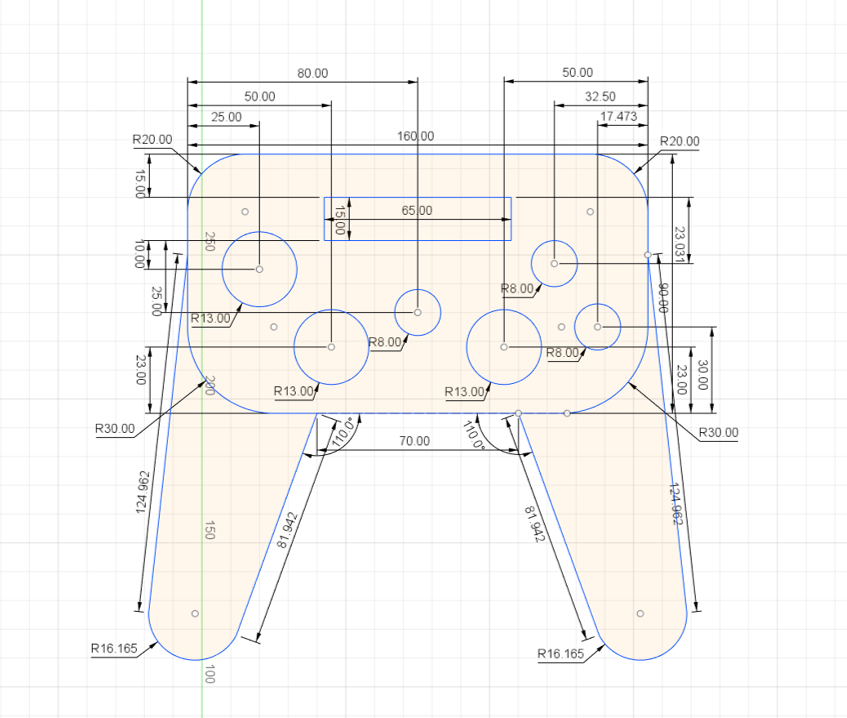
I built body design concepts on paper with the guidelines and standard considerations, quickly modelled and 3D printed draft versions to check their feasibility.
Some concepts I 3D modeled to check and many sketches were made, following are some from the lot:
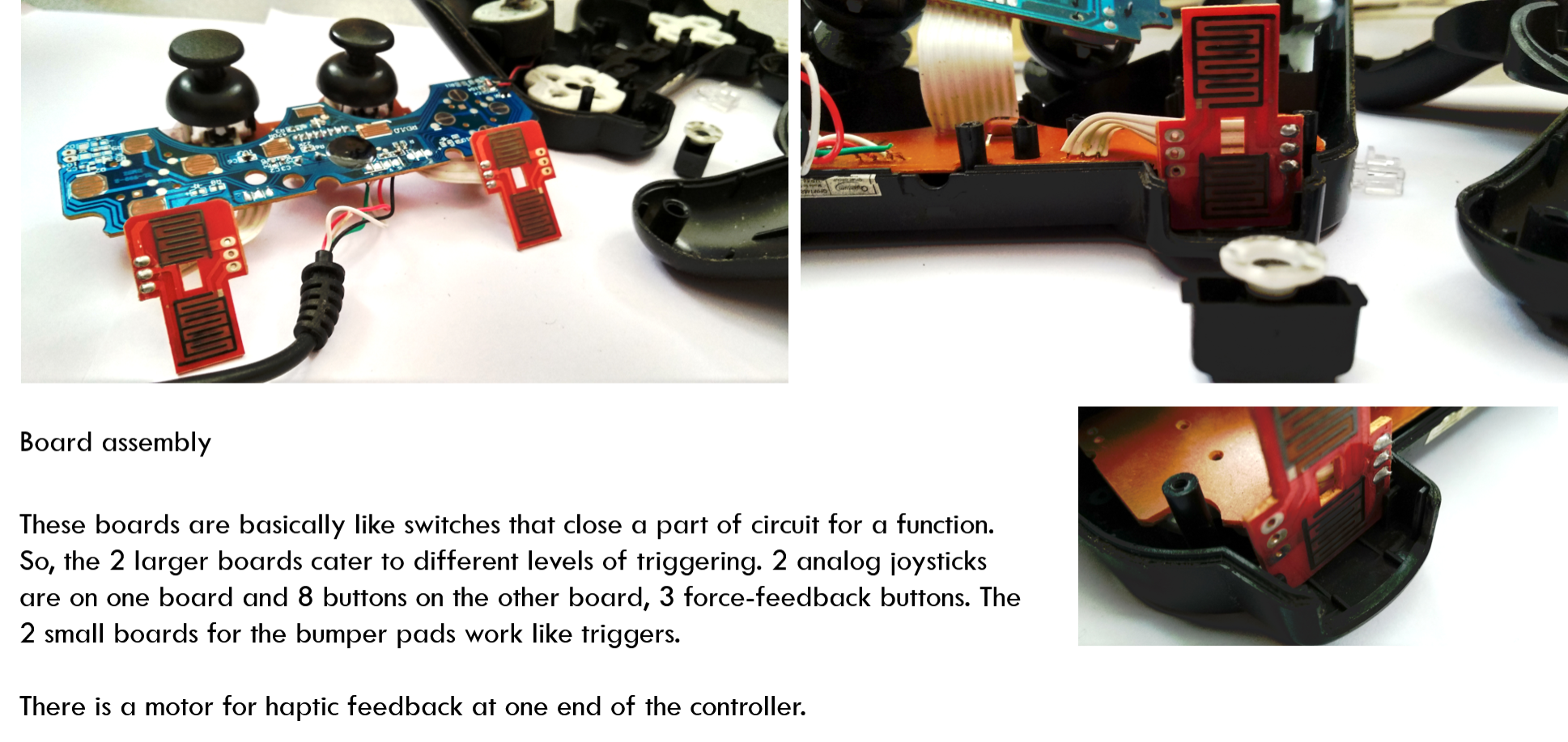
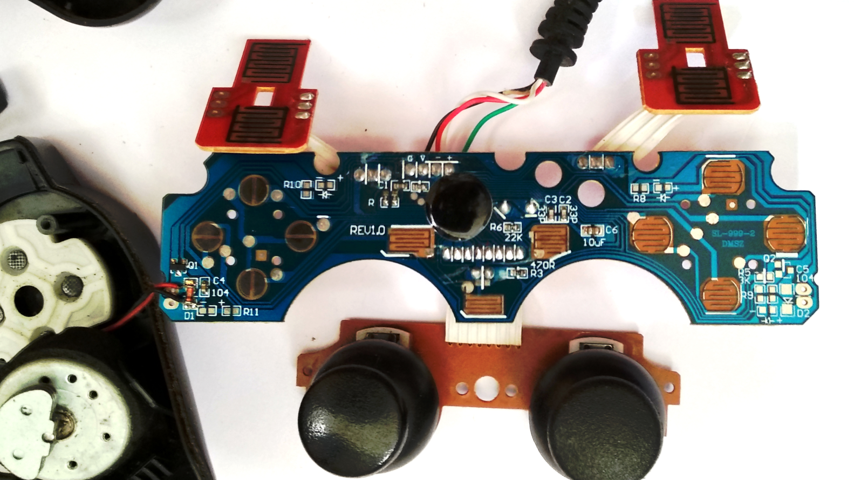
Teardown Study
We did a Teardown of a game controller to understand the intricacies involved in design of a controller. Following are the images we took of a "Quantum" controller that we had with us for study.

Mock-ups
I made a virtual controller software mock-up in Adobe XD and got guidance from my hardware designer team mate for the circuit architecture for the physical controller.
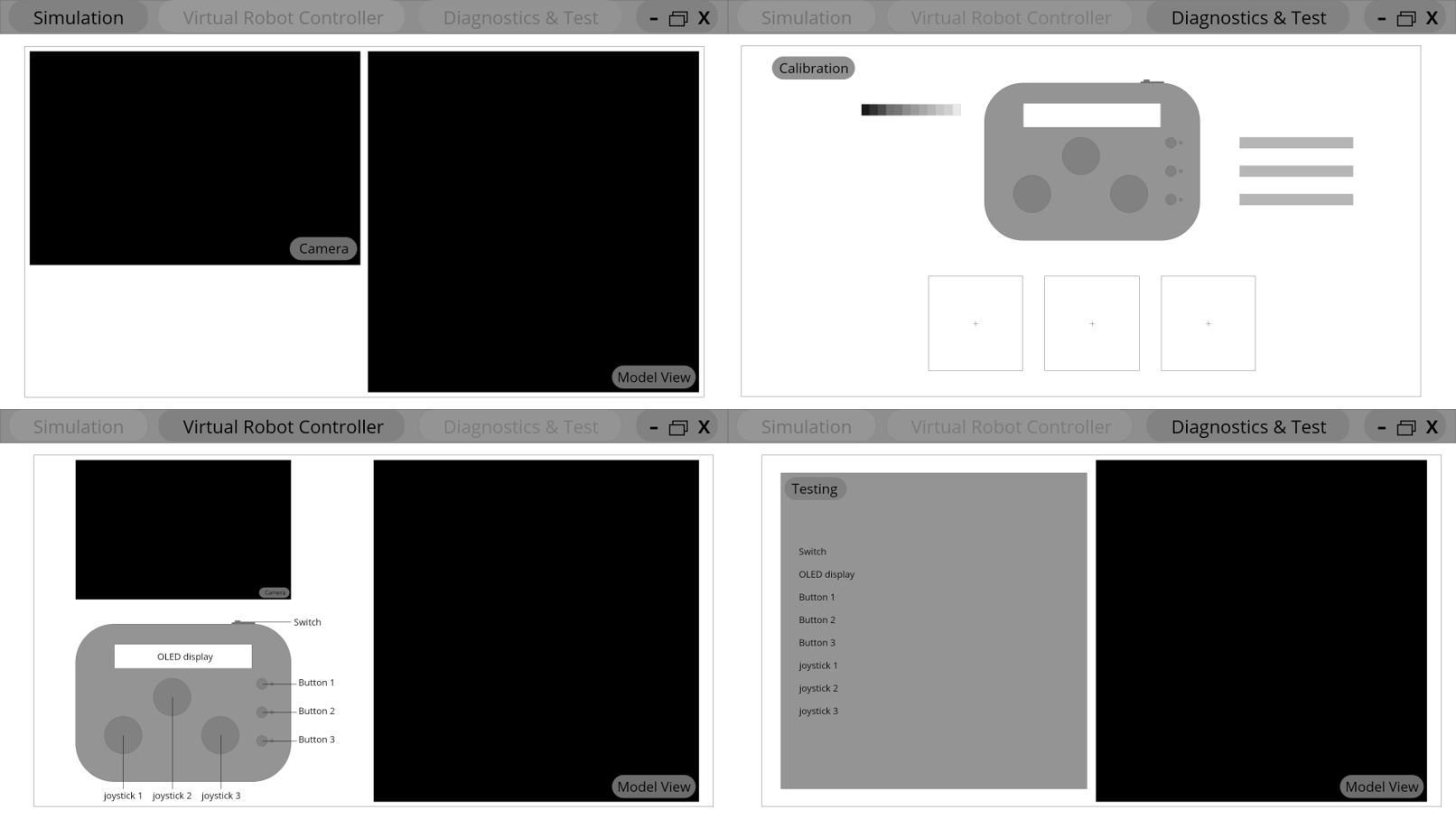
Below is are the 3D printed physical mock-ups we were testing, we selected the second design with 2 handles:


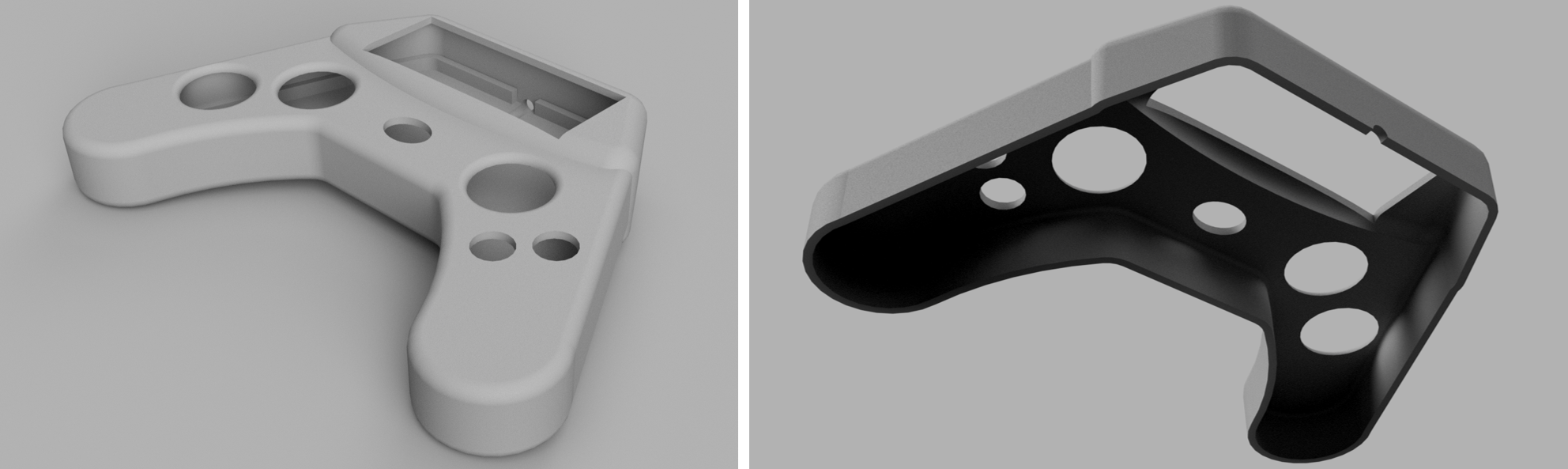
Prototype
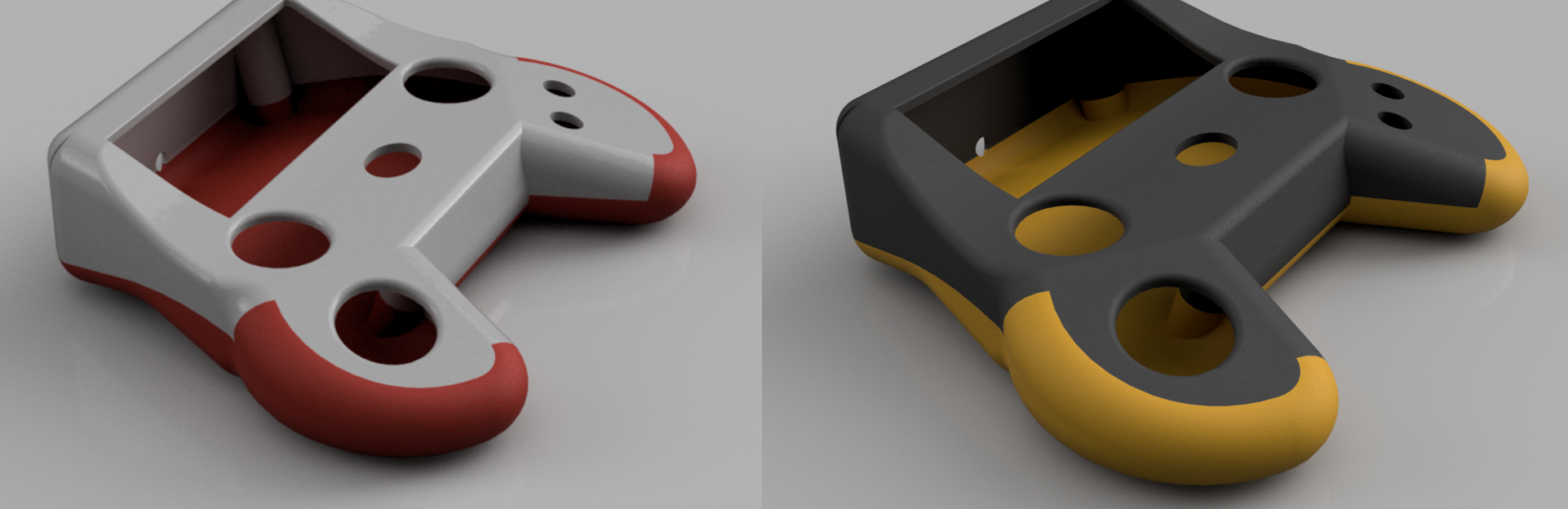
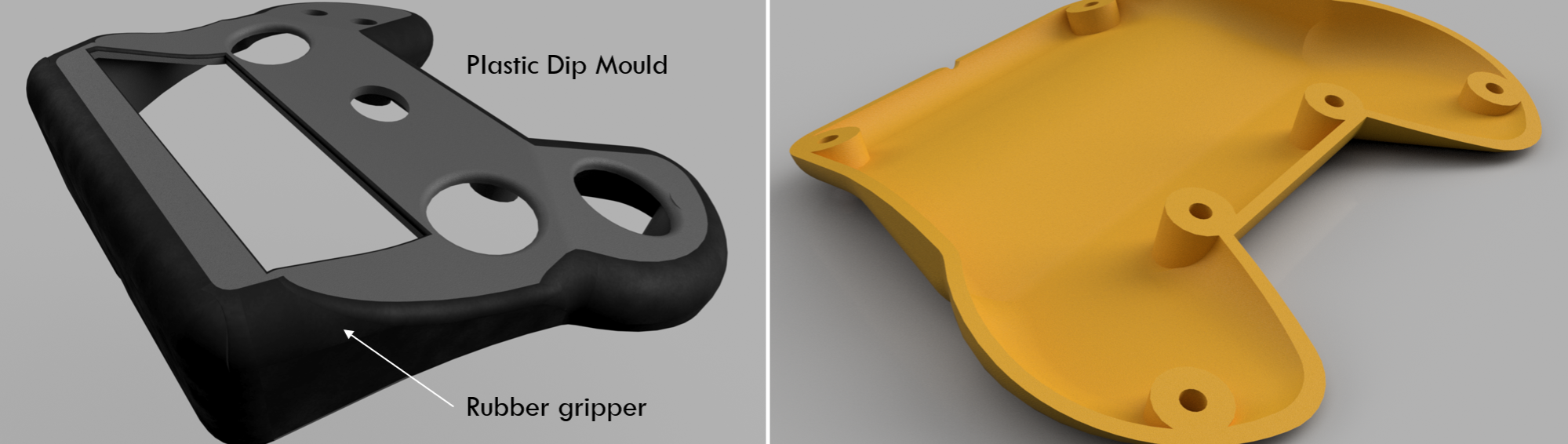
Following are some iterations we did for the body.
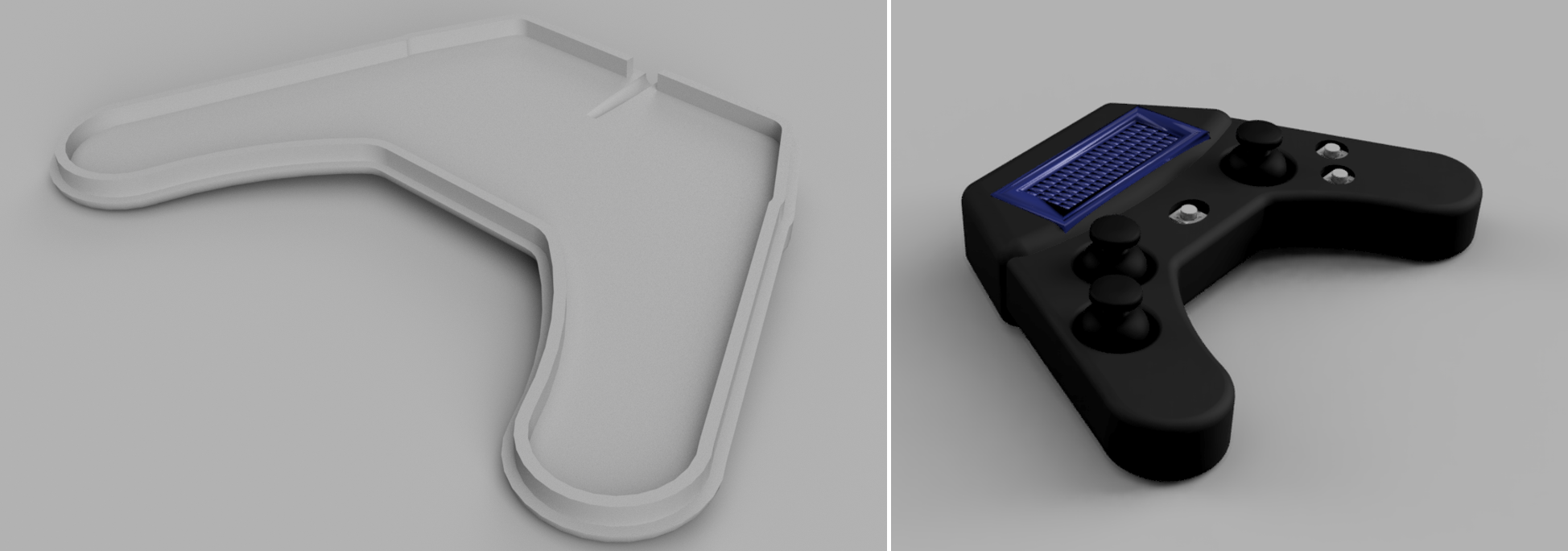

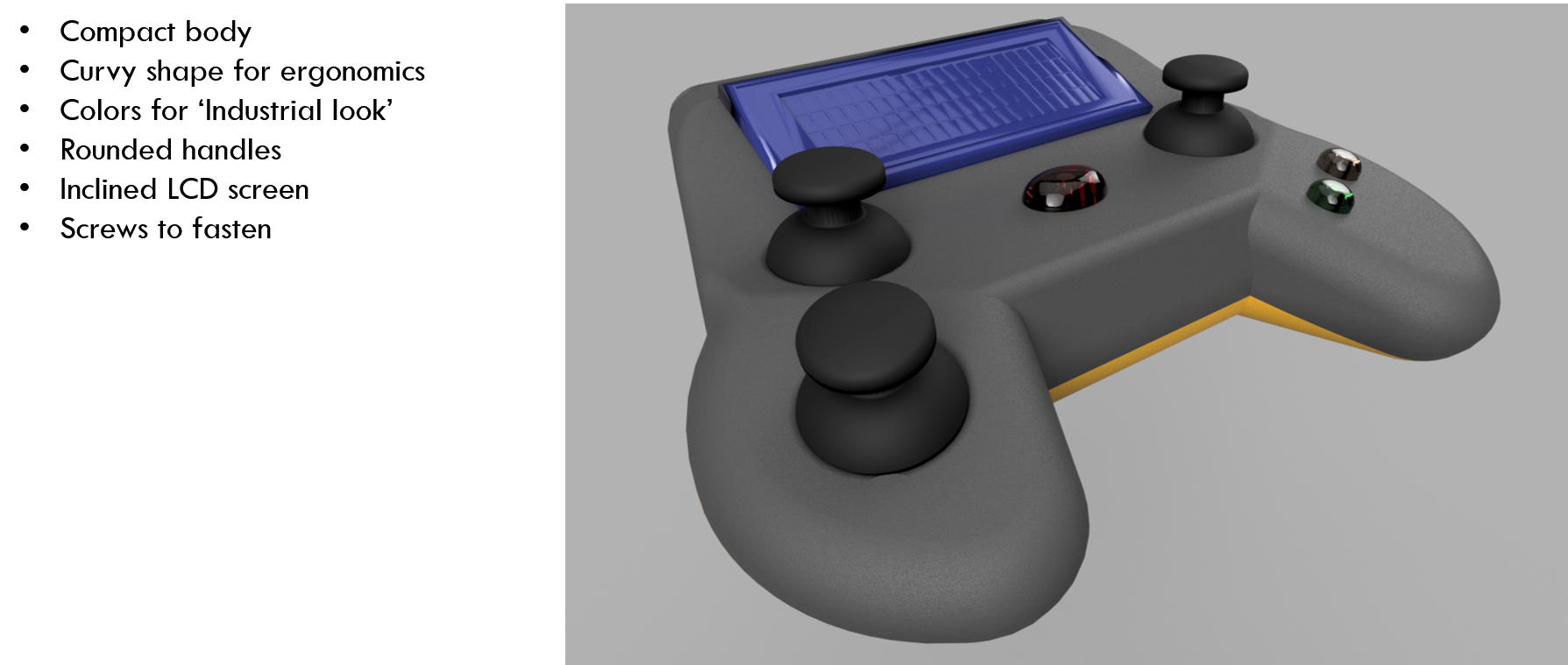
Following are some color options and the parts split of the body.